1. Apakah injap rama-rama pneumatik?
A injap rama-rama pneumatikialah injap suku pusingan yang digunakan untuk mengawal selia atau mengasingkan aliran bendalir dalam saluran paip. Ia terdiri daripada cakera bulat (sering dipanggil "cakera") yang dipasang pada batang, yang berputar di dalam badan injap. "Pneumatik" merujuk kepada mekanisme penggerak, yang menggunakan udara termampat untuk mengendalikan injap, membolehkan kawalan jauh atau automatik.
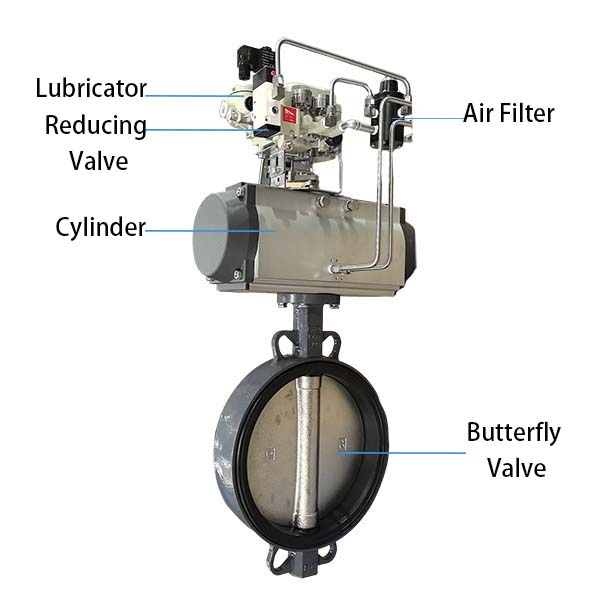
Injap rama-rama pneumatik boleh dibahagikan kepada dua komponen utama: penggerak pneumatik dan injap rama-rama.
· Badan injap rama-rama: Terdiri daripada badan injap, cakera (cakera), batang, dan tempat duduk. Cakera berputar di sekeliling batang untuk membuka dan menutup injap.
· Penggerak pneumatik: Menggunakan udara termampat sebagai sumber kuasa, memacu omboh atau bilah untuk menghasilkan gerakan linear atau berputar.
Komponen Utama
*Injap Rama-rama:
- Badan Injap: Perumah yang menempatkan cakera dan bersambung dengan paip.
- Cakera (cakera): Plat rata atau sedikit terangkat yang mengawal aliran. Apabila dipegang selari dengan arah aliran, injap akan terbuka; apabila dipegang serenjang, ia akan tertutup.
- Batang: Rod yang disambungkan ke cakera yang menghantar daya putaran dari penggerak.
- Pengedap dan tempat duduk: Pastikan penutupnya ketat dan elakkan kebocoran.
*Penggerak
- Penggerak pneumatik: Biasanya jenis omboh atau diafragma, ia menukar tekanan udara kepada gerakan mekanikal. Ia boleh bertindak dua hala (tekanan udara untuk pembukaan dan penutupan) atau bertindak tunggal (udara untuk satu arah, spring untuk pemulangan).
2. Prinsip Operasi
Operasi injap rama-rama pneumatik pada asasnya merupakan proses berantai "penggerakan udara termampat"→penggerak penggerak→putaran cakera untuk mengawal aliran." Secara ringkasnya, tenaga pneumatik (udara termampat) ditukarkan kepada gerakan mekanikal berputar untuk meletakkan cakera.
2.1. Proses Pengaktifan:
- Udara termampat daripada sumber luaran (seperti pemampat atau sistem kawalan) dibekalkan kepada penggerak pneumatik.
- Dalam penggerak bertindak dua kali, udara memasuki satu port untuk memutarkan batang injap mengikut arah jam (iaitu, untuk membuka injap), dan memasuki port yang satu lagi untuk memutarkannya mengikut arah lawan jam. Ini menghasilkan gerakan linear dalam omboh atau diafragma, yang ditukar menjadi putaran 90 darjah oleh mekanisme rak-dan-pinion atau Scotch-yoke.
- Dalam penggerak bertindak tunggal, tekanan udara menolak omboh ke arah spring untuk membuka injap, dan melepaskan udara membolehkan spring menutupnya secara automatik (reka bentuk selamat gagal).
2.2. Operasi Injap:
- Semasa penggerak memutarkan batang injap, cakera berputar di dalam badan injap.
- Kedudukan Terbuka: Cakera selari dengan arah aliran, meminimumkan rintangan dan membenarkan aliran penuh melalui saluran paip. - Kedudukan tertutup: Cakera berputar 90 darjah, berserenjang dengan aliran, menyekat laluan dan menutup pada tempat duduk.
- Kedudukan pertengahan boleh mendaptkan aliran, walaupun injap rama-rama lebih sesuai untuk perkhidmatan hidup-mati berbanding untuk pengawalaturan yang tepat disebabkan oleh ciri aliran tak linearnya.
2.3. Kawalan dan Maklum Balas:
- Penggerak biasanya dipasangkan dengan injap solenoid atau penentu kedudukan untuk kawalan yang tepat melalui isyarat elektrik.
- Sensor boleh memberikan maklum balas kedudukan injap untuk memastikan operasi yang andal dalam sistem automatik.
3. Lakonan Tunggal dan Lakonan Berganda
3.1 Penggerak Bertindak Dua Kali (Tiada Pulangan Spring)
Penggerak mempunyai dua ruang omboh yang bertentangan. Udara termampat dikawal oleh injap solenoid, yang berselang-seli antara ruang "pembukaan" dan "penutupan":
Apabila udara termampat memasuki ruang "pembukaan", ia menolak omboh, menyebabkan batang injap berputar mengikut arah jam (atau lawan arah jam, bergantung pada reka bentuk), yang seterusnya memutarkan cakera untuk membuka saluran paip.
Apabila udara termampat memasuki ruang "penutup", ia menolak omboh ke arah yang bertentangan, menyebabkan batang injap memutarkan cakera lawan arah jam, menutup saluran paip. Ciri-ciri: Apabila udara termampat hilang, cakera kekal pada kedudukan semasa ("selamat daripada kegagalan").
3.2 Penggerak Tindakan Tunggal (dengan Pulangan Spring)
Penggerak hanya mempunyai satu ruang masuk udara, dengan spring kembali di bahagian yang lain:
Apabila udara mengalir: Udara termampat memasuki ruang masuk, mengatasi daya pegas untuk menolak omboh, menyebabkan cakera berputar ke kedudukan "terbuka" atau "tertutup";
Apabila udara hilang: Daya spring dilepaskan, menolak omboh ke belakang, menyebabkan cakera kembali ke "kedudukan keselamatan" yang telah ditetapkan (biasanya "tertutup", tetapi juga boleh direka bentuk untuk "terbuka").
Ciri-ciri: Ia mempunyai fungsi "selamat-gagal" dan sesuai digunakan dalam aplikasi yang memerlukan langkah keselamatan, seperti yang melibatkan media mudah terbakar, letupan dan toksik.
4. Kelebihan
Injap rama-rama pneumatiksesuai untuk operasi pantas, biasanya hanya memerlukan suku pusingan, menjadikannya sesuai untuk industri seperti rawatan air, HVAC dan pemprosesan kimia.
- Masa tindak balas yang pantas disebabkan oleh pengaktifan pneumatik.
- Kos rendah dan penyelenggaraan yang dipermudahkan berbanding alternatif elektrik atau hidraulik.
- Reka bentuk yang padat dan ringan.